Comment connecter un moteur pas à pas avec Raspberry Pi ?
Depuis sa création, le Raspberry Pi a été recherché par de nombreux passionnés et fabricants d'informatique. Il était autrefois difficile de trouver un « Pi ». Bien qu'il ait l'air "petit" à l'extérieur, il est très puissant à l'intérieur. Il possède toutes les fonctions telles que la vidéo et l'audio. On peut dire qu'"un moineau est petit mais a tous les organes internes". Cet article explique principalement comment connecter des moteurs pas à pas via Raspberry Pi.
Choisissez un moteur pas à pas
Tout d'abord, vous devez confirmer le moteur pas à pas, car les moteurs pas à pas peuvent être divisés en deux types : les moteurs pas à pas unipolaires et bipolaires, et les méthodes de pilotage de ces deux moteurs sont différentes.
Le principal avantage des moteurs pas à pas par rapport aux servomoteurs est que la rotation complète de l'arbre du moteur est divisée en étapes et que le moteur pas à pas peut être positionné avec précision en alimentant les bobines du moteur. Même sans mécanisme de rétroaction comme un servomoteur, l'angle de pas d'un moteur pas à pas est plus petit, offrant un positionnement angulaire très précis. Dans ce projet, un simple moteur pas à pas bipolaire 12V sera utilisé.

Sélectionnez le module pilote
Pour piloter ce moteur pas à pas avec Raspberry Pi, vous devez connecter un module pilote de moteur, tel que L293D ou L298N. Les deux modules sont adaptés aux moteurs pas à pas 12 V. Le choix du module pilote vous appartient donc, ici le module pilote de moteur L298N a été choisi.
L298N est un circuit intégré de pilote dédié et est un circuit intégré à pont en H. La différence avec le L293D est que son courant de sortie est augmenté et sa puissance est améliorée. Son courant de sortie est de 2 A, le courant maximum est de 4 A et la tension de fonctionnement maximale est de 50 V. Il peut piloter des charges inductives, telles que des moteurs à courant continu haute puissance, des moteurs pas à pas, des électrovannes, etc. directement connecté au microcontrôleur, ce qui facilite le contrôle par le microcontrôleur. Lorsque vous conduisez un moteur à courant continu, vous pouvez contrôler directement le moteur pas à pas et réaliser une rotation avant et arrière du moteur. Pour réaliser cette fonction, il vous suffit de modifier le niveau logique de la borne d'entrée.
Connectez le Raspberry Pi au moteur pas à pas
La figure ci-dessous montre le schéma de connexion pour le contrôle du moteur pas à pas Raspberry Pi utilisant le L298N. Il est implémenté à l’aide de l’application Fritzing.
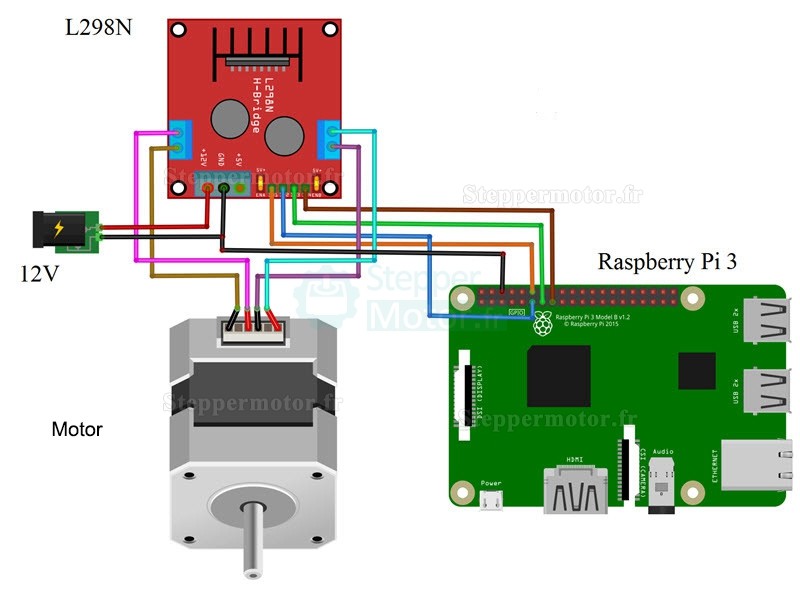
Les entrées du module pilote de moteur, c'est-à-dire IN1, IN2, IN3 et IN4, sont connectées aux broches physiques 11, 12, 13 et 15, c'est-à-dire GPIO17, GPIO18, GPIO27 et GPIO22 du Raspberry Pi. Un jeu de bobines de moteur est connecté à OUT1 et OUT2 du pilote de moteur, et l'autre jeu est connecté à OUT3 et OUT4. Pour fournir une alimentation externe 12 V au module pilote de moteur, la borne de terre du module pilote de moteur L298N et du Raspberry Pi sont communes. Fournissez une alimentation 5 V séparée au Raspberry Pi.
Le but de ce projet simple est simplement de comprendre comment connecter un moteur pas à pas à l'aide d'un Raspberry Pi et d'un L298N. Le travail de ce projet est très simple et expliqué ici.
برچسب: